
How all wheel drive works
How all wheel drive works?
What components make all wheel drive work?
To understand how all wheel drive works, we first have to understand how they’re different from regular rear wheel drive and front wheel drive vehicles. Here are images of each. In the rear wheel drive vehicle, power transfers from the engine to the transmission. The power then flow through the front U-joint to the drive shaft. The drive shaft rotates and transfers power to the rear U-joint which is connected to the rear differential. The rear differential allows each rear wheel to drive the vehicle forward, yet free-wheel at a different speed than the other rear wheel when going around curves and in turns.
The front wheel drive vehicle transfers power from the engine to the transaxle which often incorporates an integral differential. The two front axle shafts or “half shafts” connect to the transaxle. Because the wheels on a front wheel drive vehicle must turn left and right in addition to up and down, constant velocity (CV) joints are used instead of standard U-joints. CV joint allow a great turn radius while still provided constant torque to the wheels. As with the rear wheel drive vehicle, the integral differential allows the front wheels to drive the vehicle, yet free-wheel at different rates in curves and turns.
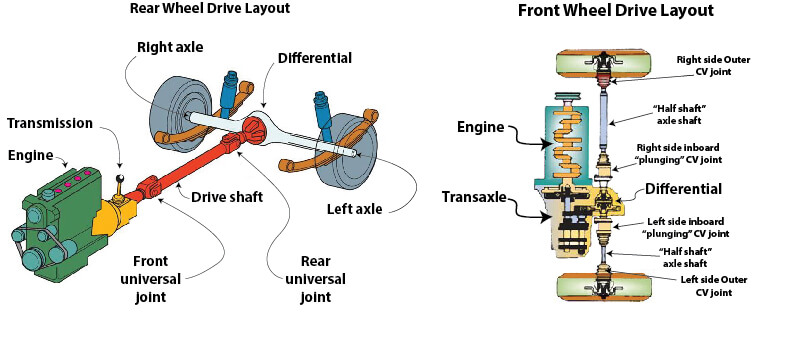
A comparison of rear wheel drive and front wheel drive vehicles
Now lets take a look at the differences between part time four wheel drive (4WD) and full time 4WD. A part time 4wd transfers power from the transmission to a transfer case. The transfer case divides the power equally between the front and rear wheels. Both the front and rear wheels are driven by a differential that allows for different rotation rates in curves and turns. The problem with this setup is that the front wheels and rear wheels travel at different rotation rates in curves and turns. Since there’s no center differential in this design, the rotation difference holds the potential to bind/break the drive shafts or destroy the transfer case if the vehicle is driven in 4WD mode on dry pavement. However, on wet or snow-packed pavement, the wheels can slip, and it’s that slipping feature that eliminates the need for a center differential.
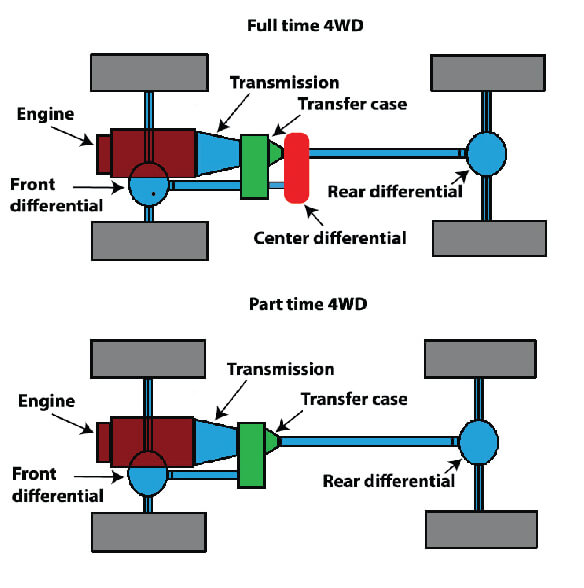
Part time 4WD versus Full time 4WD
In a full-time 4WD vehicle, engine power travels the same path through the transmission and transfer case. It then flows through a center differential that can accommodate different front to rear rotation rates. So those vehicles can be driven on wet or dry pavement in 4WD mode. Newer full-time 4WD vehicles offer automatic 4WD engagement when road conditions call for it. Full time 4WD vehicles generally divide torque equally between all four wheels. However, some later model designs allow for varying torque based on road conditions.
All wheel drive enters the picture.
All wheel drive vehicles are similar to, but not exactly the same as full time 4WD vehicles.
Instead of using a costly and heavy center differential, all wheel drive vehicles incorporate a viscous clutch that’s connected to the transfer case.
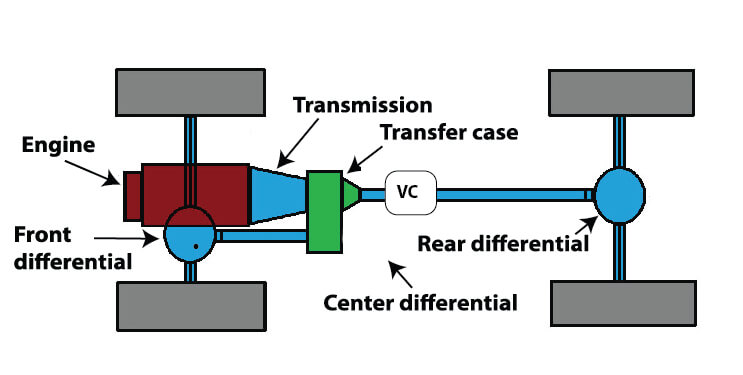
All wheel drive
The viscous coupling saves cost and weight and has a much simpler mechanism.
How a viscous coupling works
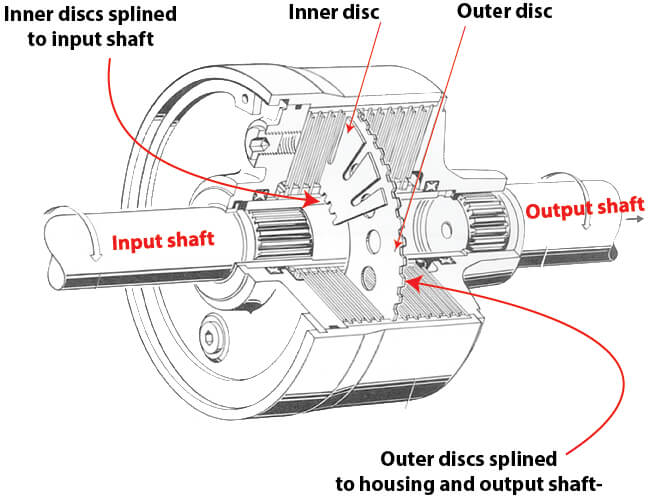
Viscous coupling
A viscous coupling is a sealed unit. It contains a serious of interleaved clutch plates. The inner plates are splined to the input shaft and spin the entire time transfer case provides rotation. The outer clutch plates are splined to the housing which contains the output shaft.
The discs have tabs or perforations to effect cooling and allow liquid to flow between the discs.
The entire device if filled with a temperature sensitive silicone fluid. When the inter and outer discs rotate together, the fluid stays cool and remains in a liquid state.
However, when the discs rotate at different speeds, as what happens when front and rear wheel rotations are different, the fluid heats up and become nearly solid, gluing the plates together. So viscous coupling provides drive power to rear wheels while allowing different front to rear rates of rotation.
Different types of all wheel drive
Unlike 4WD vehicles where the torque is split equally between all four wheels, modern all wheel drive mechanisms can be designed to proportion power front to back based on driving conditions. For example, an all wheel drive system may provide full torque to the front wheels until it detect front wheel slip. At that point, it can divert rotation force to the rear wheels. Or, the all wheel drive unit can maintain a 60/40 split until it detects wheel slip and then vary the torque front to back.
What causes all wheel drive to go bad?
• Viscous coupling overheating caused by variation in tire diameters. For more information on the importance of tire size in all wheel drive vehicles, see this post
• Loss of fluid to to leaking seals.
©, 2018 Rick Muscoplat
Posted on by Rick Muscoplat