
Everything You Need to Know About AWD Systems
AWD System Explained: How All-Wheel Drive Works and How It Differs From 4WD
Quick Summary
If you’ve ever wondered how an AWD system works or what the AWD vs 4WD difference really is, you’re not alone. Many drivers assume they’re the same thing, but they’re actually very different driveline designs.
• An AWD system automatically distributes power to all four wheels to improve traction and stability.
• Most modern AWD vehicles can vary torque between the front and rear wheels based on road conditions.
• AWD is designed primarily for on-road use and all-weather driving.
• Traditional 4WD systems are designed for severe off-road conditions and low-traction environments.
• The biggest AWD vs 4WD difference is how power is distributed and when the system is engaged.
As an ASE Master Technician and automotive writer, I’ve found that understanding these differences helps drivers choose the right vehicle and avoid expensive drivetrain repairs.
How an AWD System Works
An AWD system, or all-wheel-drive system, sends engine power to all four wheels rather than just the front or rear wheels. The goal is simple: maximize traction and maintain vehicle stability when road conditions become challenging.
Unlike a conventional front-wheel-drive vehicle, which powers only the front tires, an AWD system can distribute torque between the front and rear axles whenever additional traction is needed.
In modern vehicles, this process happens automatically. Drivers don’t have to push a button or shift a lever. The system continuously monitors wheel speed, steering angle, throttle position, and road conditions to determine where power is needed most.
This is one reason AWD vehicles have become increasingly popular in areas that experience snow, rain, and icy roads.
The Main Components of an AWD System
Several key components work together to make an AWD system function effectively:
Transfer Case — The transfer case receives power from the transmission and directs it to both axles.
• Front and Rear Differentials — Differentials allow the wheels to rotate at different speeds during turns. Without them, the tires would scrub, and the drivetrain would bind when cornering.
• Electronic Sensors — Modern AWD systems rely on sensors that monitor:
• Wheel speed
• Steering angle
• Throttle position
• Vehicle yaw
• Traction control activity
• Electronic Control Module
The control module processes sensor data and determines how much torque to apply to each axle.
Two Types of All-Wheel Drive Systems
AWD systems can be broadly categorized into two types: Full-time AWD and Part-time AWD. Each type operates differently and offers distinct advantages depending on the driving conditions and vehicle design.
Full-Time AWD
Full-time AWD systems continuously send power to all four wheels. This system is always active, providing consistent traction and stability. A center differential, similar to those found in front or rear axles, allows the wheels to rotate at different speeds, which is crucial for smooth cornering and handling.
Part-Time AWD
Part-time AWD systems operate primarily in two-wheel-drive mode (usually front-wheel drive) and engage all four wheels only when additional traction is needed. This activation can be automatic, based on sensors detecting wheel slip, or manual, controlled by the driver via a switch or button. Part-time AWD systems often include a transfer case that distributes power to the front and rear axles when AWD is engaged.
How Modern AWD Systems Distribute Power
One of the biggest misconceptions I hear is that all four wheels always receive equal power. That’s rarely true. Modern AWD systems can constantly vary torque distribution.
Examples include:
• 100% front / 0% rear during normal cruising
• 70% front / 30% rear under moderate acceleration
• 50% front / 50% rear in slippery conditions
• 40% front / 60% rear in performance-oriented vehicles
Some advanced systems can even direct torque side-to-side to improve cornering performance.
This technology is often called torque vectoring.
AWD vs 4WD Difference: What Drivers Need to Know
The AWD vs 4WD difference is one of the most misunderstood topics in the automotive world. Although both systems drive all four wheels, they are designed for different purposes.
AWD — An AWD system is primarily designed for:
• Snow-covered roads
• Rain-soaked pavement
• Light gravel roads
• Everyday driving
Advantages:
• Automatic operation
• Better road manners
• Improved handling
• No driver intervention required
4WD — A traditional four-wheel-drive system is designed for:
• Deep mud
• Rock crawling
• Sand
• Severe off-road use
Advantages:
• Maximum traction
• Low-range gearing
• Greater durability in extreme terrain
Why Part-Time 4WD Can Cause Drivetrain Binding
Traditional part-time 4WD systems lack a center differential. When engaged, the transfer case locks the front and rear driveshafts together.
This means:
• Front and rear wheels must rotate at nearly identical speeds.
• During turns, the wheels naturally want to rotate at different speeds.
• Drivetrain stress builds rapidly on dry pavement.
This condition is called drivetrain binding.
That’s why part-time 4WD should only be used on loose surfaces such as:
• Snow
• Ice
• Mud
• Dirt
Full-Time 4WD vs AWD
Some drivers assume full-time 4WD and AWD are identical. They’re not.
Full-time 4WD systems use a center differential that allows for different front-to-rear wheel speeds, making them suitable for dry-pavement operation.
However, they are generally more robust and better suited to off-road applications than most AWD systems.
Benefits of an AWD System
Superior Traction — The biggest benefit is improved traction during:
• Snow
• Rain
• Ice
• Gravel roads
• Improved Stability
An AWD system helps maintain vehicle control during acceleration and cornering.
Better Performance — Many sports cars use AWD to improve acceleration and handling.
Increased Driver Confidence — Drivers often feel more secure knowing all four wheels can receive power when conditions become slippery.
How a viscous coupling works
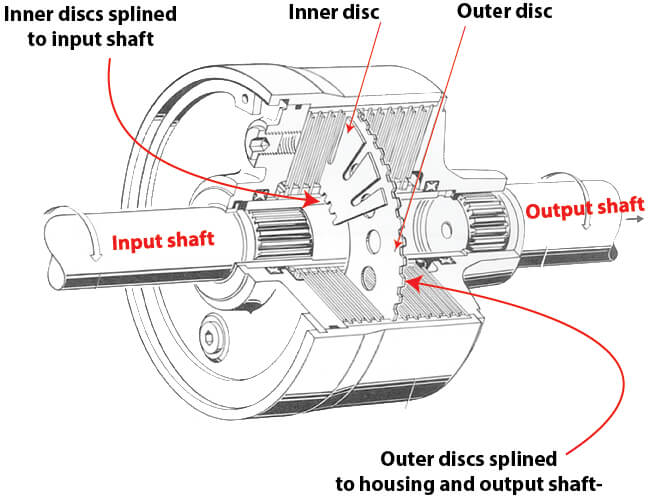
Viscous coupling
A viscous coupling is a sealed unit containing a series of interleaved clutch plates. The inner plates are splined to the input shaft and spin the entire time the transfer case provides rotation. The outer clutch plates are splined to the housing, which contains the output shaft.
The discs have tabs or perforations to affect cooling and allow liquid to flow between the discs.
The entire device is filled with a temperature-sensitive silicone fluid. When the inner and outer discs rotate together, the fluid stays cool and remains in a liquid state.
However, when the discs rotate at different speeds, as happens when front and rear wheel rotations are different, the fluid heats up and becomes nearly solid, gluing the plates together. So, viscous coupling provides drive power to the rear wheels while allowing different front-to-rear rotation rates.
Common AWD System Problems
Like any drivetrain system, AWD systems can fail.
Common issues include:
• Uneven tire wear
• Mismatched tire sizes
• Failed wheel speed sensors
• Transfer case damage
• Differential wear
• Overheated viscous couplings
One of the most common causes of AWD failure is driving with tires that differ significantly in diameter. Even small differences can force the AWD system to work constantly, causing premature wear.
Is AWD Better Than 4WD?
The answer depends entirely on how you drive.
Choose AWD if you:
• Primarily drive on paved roads
• Encounter snow and rain regularly
• Want automatic traction management
• Prioritize comfort and fuel economy
Choose 4WD if you:
• Frequently travel off-road
• Tow heavy loads in rough terrain
• Need low-range gearing
• Drive in extreme conditions
For most drivers, an AWD system offers the ideal balance of traction, safety, comfort, and convenience.
Final Thoughts
The modern AWD system is one of the most effective traction technologies available today. By continuously monitoring road conditions and adjusting power distribution, AWD systems provide exceptional stability and control in all kinds of weather.
Understanding the AWD vs 4WD difference is equally important. While both systems drive all four wheels, AWD is optimized for daily driving and changing weather conditions, while 4WD remains the superior choice for serious off-road use.
Knowing how these systems work can help you choose the right vehicle, maintain it properly, and avoid costly drivetrain repairs.
©, 2018 Rick Muscoplat
Posted on by Rick Muscoplat